Genel amaçlı humanoid robotlar, mevcut insan merkezli kentsel ve endüstriyel iş alanlarına hızlı bir şekilde uyum sağlamak için inşa edilmiştir. Bu robotlar, sıkıcı, tekrarlayan veya fiziksel olarak zorlayıcı görevleri üstlenerek değeri arttırmaktadır. İnsan merkezli ortamlarda doğal olarak başarılı olmaları, onları fabrika zeminlerinden sağlık tesislerine kadar giderek daha değerli hale getiriyor.
İmitasyon öğrenme, humanoid robotların uzman insan gösterimlerini gözlemleyerek ve taklit ederek yeni beceriler kazanması için bir yöntem sunmaktadır. Gerçek dünyada bu yüksek kaliteli veri setlerini toplamak oldukça zahmetli, zaman alıcı ve maliyet açısından caydırıcıdır. Bununla birlikte, fiziksel olarak doğru simüle edilmiş ortamlardan üretilen sintetik veriler, veri toplama sürecini hızlandırabilir.
NVIDIA Isaac GR00T, bu zorlukların üstesinden gelmek için geliştirilmiştir ve humanoid robot geliştiricilerine robot temel modelleri, veri boru hatları ve simülasyon çerçeveleri sunmaktadır. NVIDIA Isaac GR00T’un Sintetik Hareket Üretimi için Blueprint, imitasyon öğrenimi için tasarlanmış bir simülasyon iş akışıdır; bu çalışma ile az sayıda insan gösteriminden eksponansiyel olarak büyük veri setleri üretebilirsiniz.
Bu yazıda, Apple Vision Pro’dan teleoperasyon verisi nasıl toplanacağının yanı sıra, NVIDIA Isaac GR00T kullanarak yalnızca birkaç insan gösteriminden büyük sintetik hareket veri setleri nasıl oluşturulacağını ve ardından bir robot hareket politikası modelinin Isaac Lab’de nasıl eğitileceğini anlatıyoruz.
Sintetik Hareket Üretimi
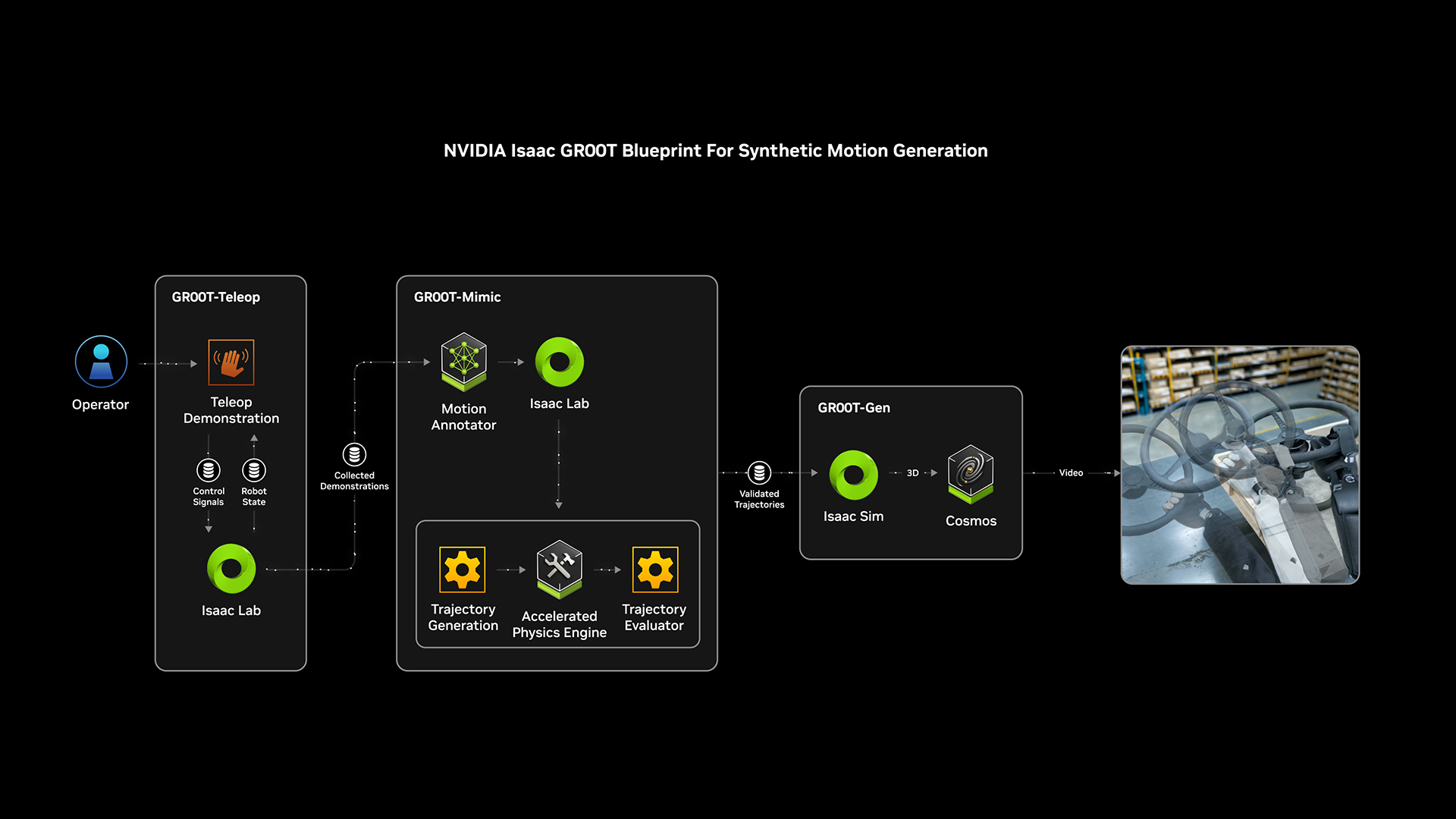
İş akışının ana bileşenleri şunlardır:
- GR00T-Teleop:
- NVIDIA CloudXR: Apple Vision Pro başlığına bağlanarak, humanoid teleoperasyonu için özel olarak tasarlanmış bir CloudXR çalışma süresi kullanarak eylemleri iletme.
- Isaac XR Teleop: Bu referans uygulaması ile Apple Vision Pro’dan NVIDIA Isaac Sim veya Isaac Lab’e teleoperasyon verilerini akıtma.
- Isaac Lab: Robot politikalarının eğitimini sağlamak için açık kaynaklı birleşik bir çerçeve. Isaac Lab, NVIDIA Isaac Sim üzerine inşa edilmiştir.
- GR00T-Mimic: Birkaç insan gösteriminden büyük miktarda sintetik hareket veri seti üretme.
- GR00T-Gen: Arka plan, aydınlatma ve diğer değişkenleri rastgeleleştirerek ek çeşitlilik ekleme ve üretilen görüntülerin kalitesini artırma. (Bu yazıda GROOT-Gen detaylı olarak ele alınmayacaktır.)

Sintetik hareket üretim süreci, robotları eğitmek için büyük ve çeşitli bir veri seti oluşturmayı hedefleyen karmaşık bir süreçtir.
Bu süreç, yüksek yeterliliğe sahip bir cihaz olan Apple Vision Pro’nun kullanımı ile başlar. Bu cihaz, insan hareketleri ve eylemlerini simüle edilmiş bir ortamda toplar. Apple Vision Pro, el izleme verilerini Isaac Lab gibi bir simülasyon platformuna akıtırken, robotun çevresinin içsel bir görünümünü aynı anda geri iletir. Bu düzenek, robotun sezgisel ve etkileşimli bir şekilde kontrol edilmesine olanak tanır, böylece yüksek kaliteli teleoperasyon verisi toplanır.

Isaac Lab’deki robot simülasyonu, Apple Vision Pro’ya akıtılır ve robotun çevresi görselleştirilir. Ellerinizi hareket ettirerek, robotu sezgisel bir şekilde çeşitli görevleri yerine getirmek için kontrol edebilirsiniz. Bu düzenek, etkileyici ve etkileşimli bir teleoperasyon deneyimi sunar.

Sintetik Trajektori Üretimi GR00T-Mimic ile
Veri toplandıktan sonra, sıradaki adım sintetik trajektori üretimidir. Isaac GR00T-Mimic, sınırlı sayıda insan gösteriminden geniş bir sintetik hareket trajektori oluşturmak için kullanılır.
Bu işlem, gösterimlerdeki ana noktaların etiketlenmesini ve sintetik trajektorilerin düzgün ve bağlam açısından uygun olmasını sağlamak için arayüzleme işlemini içerir. Üretilen veriler, eğitim için gereken kriterleri karşılayacak şekilde değerlendirilir ve iyileştirilir.
Bu örnekte, başarıyla 1,000 sintetik trajektori oluşturduk.



Isaac Lab’de İmitasyon Öğrenimi ile Eğitim
Son olarak, sintetik veri seti, robotun eğitilmesinde imitasyon öğrenme teknikleri kullanılarak değerlendirilir. Bu aşamada, Robomimic setinden bir sürekli Gaussian karışım modeli (GMM) gibi bir politika, sintetik verilerde gösterilen eylemleri taklit etmek üzere eğitilir.
Eğitim, Isaac Lab gibi bir simülasyon ortamında gerçekleştirilir ve eğitilen politikanın performansı birden fazla deneyle değerlendirilir. Bu iş akışı, robotik sistemlerin geliştirilmesi ve devreye alınması için gereken zaman ve kaynakları önemli ölçüde azaltır, bu da onu robotik alanında değerli bir araç haline getirir.
Bu verilerin nasıl kullanılacağını göstermek için, bir Franka robotunu Isaac Lab’de bir yığın oluşturma görevini yerine getirmek üzere eğittik. Gripper, humanoid bir robotta bulunan bir benzeriyle aynıdır.
Davranışsal Taklit kullanarak, Robomimic setinden bir GMM politikası kullanıldı. Politika, 400 gizli boyut ile iki uzun kısa dönem hafıza (LSTM) katmanı içerir.
Ağ için giriş, robotun uç efektör pozisyonu, gripper durumu ve nesne pozları iken, çıkış, robotu Isaac Lab ortamında adım adım hareket ettirmek için kullanılan bir delta poz aksiyonudur.
1,000 başarılı gösterim ve 2,000 yineleme içeren bir veri seti ile, eğitim hızı yaklaşık 50 yineleme/saniye (NVIDIA RTX 4090 GPU üzerinde yaklaşık 0.5 saat eğitim süre) elde edildi. 50 deneme ortalamasında eğitilen politika, yığın oluşturma görevinde %84 başarı oranına ulaştı.

Başlayın
Bu yazıda, NVIDIA Isaac GR00T üzerinden humanoid hareket politikası öğrenimini hızlandırmanın yollarını ele aldık. Sintetik hareket verileri üretimi ile oldukça hızlı bir eğitim süreci yakalandı.
GR00T-Teleop paketi, davetiyeye özel erken erişim aşamasındadır. Beta sürümü için Humanoid Geliştirici Programına katılın.
NVIDIA CEO’su Jensen Huang’ın sunumunu izlemek için CES 2025 anahtarı‘na göz atın ve bültenimize abone olun ve NVIDIA Robotics’i takip edin YouTube, Discord ve geliştirici forumları ile güncel kalın.