


COMPUTEX 2025’te NVIDIA, robotların gelişimini hızlandırmak amacıyla NVIDIA Isaac Sim isimli simülasyon uygulamasında ve NVIDIA Isaac Lab robot öğrenme framework’ünde yapılan yeni güncellemeleri tanıttı. Bu güncellemeler, her tür robota yönelik geliştirmeleri destekliyor.
Isaac Sim ve Lab, NVIDIA RTX PRO 6000 çalışma istasyonları ve sunucularında tam uyumlu olarak çalışacak. Bu sayede, robot geliştirme iş akışları için eğitim, sentetik veri üretimi, robot öğrenimi ve simülasyon gibi her iş yükü için tek bir mimari sunulmuş olacak.
Bu yazıda, Isaac Sim ve Isaac Lab’deki yenilikleri, bunların robotik iş akışlarını nasıl hızlandırdığı ile birlikte, bu yılın ikinci çeyreğinde kullanıma sunulacak olan güncellemeleri daha ayrıntılı olarak ele alacağız.
Isaac Sim 5.0’da Neler Yeni?
Isaac Sim 5.0, NVIDIA Omniverse ve OpenUSD üzerine inşa edilmiş olup, açık ve özelleştirilebilir bir yapıya sahip. Bu yeni sürüm, NVIDIA Launchable ile hızlandırılmış geliştirme süreçleri sunuyor ve ileri düzey sentetik veri üretim hatları destekliyor. Ayrıca, bu güncellemeler, robot simülasyonunu hızlandırmak için tasarlandı.
Özelleştirme ve Ulaşım Kolaylığı
Isaac Sim 5.0, önümüzdeki günlerde GitHub‘da açık kaynak olarak kullanılacak. Bu versiyon, kullanıcıların ihtiyaçlarına özel simülasyonlar oluşturmasına olanak tanıyan tamamen özelleştirilebilir bir yapı sunuyor. Ayrıca, sentetik veri üretimi ve Yazılım-Döngüsü (Software-in-the-Loop) testleri için de uygun hale getirildi.
Yalnızca ticari dağıtım hakları ve ek kurumsal destek için Omniverse Enterprise lisansı almak gereklidir.
Daha Hızlı Başlangıç için NVIDIA Brev
Isaac Sim 5.0, NVIDIA Brev üzerinden erişilebilir olacak. Bu araç, iş geliştiricilerine büyük bulut sağlayıcılar arasında doğrudan erişim imkanı sunuyor ve Isaac Sim’i hızlı bir şekilde başlatabilme imkanını sağlıyor. Bu sayede, altyapı yönetimi sorunları ortadan kalkarak, geliştirme döngüleri hızlanacak.
Kullanıcılar, bir tıklama ile dağıtım yapabilir veya örnek türlerini ve bağlantı yapılandırmalarını seçerek özelleştirilmiş bir dağıtım yapabilirler.
İleri Düzey Sentetik Veri Üretim Hatları
Simülasyondan üretilen sentetik veriler, gerçek dünya fiziğinin doğru bir modellemesini sağlar. Bu, tehlikeli olabilecek nadir senaryoların yakalanmasını sağlayarak eğitimin kalitesini artırır.
MobilityGen
Yüksek kaliteli hareket verisi, daha zeki ve uyumlu robotların eğitilmesi için temeldir. Bu veriler, robotların güvenli ve verimli bir şekilde gerçek dünyada çalışabilmeleri için gerekli olan gerçekçi hareket dinamikleri ve zengin zemin gerçek verileri sağlar.
MobilityGen, Isaac Sim’de bir uzantı olarak sunulacak ve kapsamlı fizik tabanlı veri ve algı modeli eğitim verileri üretecek. Üretilen veriler, otonom mobil robotlar, dört ayaklılar ve insan benzeri robotlar için kullanılabilir.
Sentetik Veri Üretimini Fiziksel Alanlara Yayma
Fiziksel Yapay Zeka, robotlar, otonom araçlar ve akıllı alanlar gibi sistemlerin gerçek dünya ortamlarını algılayıp bunlarda hareket edebilmesini sağlar. Geliştiricilerin karmaşık 3D alanlardaki ortamları doğru bir şekilde simüle eden eğitim verilerine ihtiyacı vardır.
Isaac Sim’de yeni uzantılar, sentetik görüntü ve video verileri üretir ve görsel AI modellerini eğitmek için kullanılır. Bu uzantılar arasında:
- Isaacsim.Replicator.Agent: İnsan ve robot karakterlerin 3D ortamlarda yürüyüş, oturuş veya kaldırma gibi eylemler gerçekleştirmesini simüle eder.
- Isaacsim.Replicator.Object: Konfigüre edilebilir sahneler ve alan rastgeleliği ile nesne algılama için sentetik veri setleri oluşturur.
- Olay uzantısı (Isaac 5.0’da gelecek): Yangınlar, döküntüler veya düşen nesneler gibi olay bazlı veri üretir.
- Açıklama uzantısı (Isaac 5.0’da gelecek): Görsel-dil modelleri için sahne anlayışında fotoğraf-altyazı çiftleri oluşturur.
Cosmos Dünya Temel Modelleri ile Veri Formatı Uyumluluğu Gelişimi
Dünya temel modelleri (WFM), Isaac Sim’den üretilen sentetik verileri gerekli fotoğraf gerçekçiliğine artırmaya yardımcı olabilir. Yeni NVIDIA Omniverse Replicator yazıcısı, Cosmos Transfer girişi için optimize edilmiştir. Kullanıcıların yüksek kaliteli sentetik verileri kolayca oluşturup dışa aktarmalarına olanak tanır.
Geliştirilmiş Sensör Simülasyonu
Doğru sensör simülasyonu, robotik ve bilgisayarla görme uygulamalarının başarılı bir şekilde gerçek dünyada uygulanabilmesi için gereklidir. Isaac Sim, geliştiricilerin gerçek sensör verilerine benzer gürültü desenleriyle derinlik görüntüleri üretmesini sağlayan genel bir derinlik haritası gürültü modelini destekleyecektir.
Geliştirilmiş Aktüatör Modelleri
Isaac Sim artık, Hexagon Robotics ve maxon ile işbirliği içerisinde geliştirilen bir OpenUSD şeması üzerinden tanımlanan yeni bir eklem sürtünme modeline sahiptir. Bu modeller, simülasyonlardaki eklem ve motorların davranışlarını gerçek verilere yakın bir şekilde izler.
Standardize Edilmiş ROS 2 Arayüzleri ile Robotik İş Akışlarını Hızlandırma
Yeni standartlaşmış ROS 2 simülasyon arayüzleri, robotik bir sorun olan farklı simülatörleri kontrol etmek için tutarlı bir yöntem sunarak, geliştiricilerin simülasyonlarını basitçe kontrol etmelerine imkan tanır.
ZMQ köprüsü, Isaac Sim 4.5 için eklenen bir uzantıdır ve ROS dışındaki uygulamalarla hızlı çift yönlü iletişim sağlar. Kamera verisi akışı, zemin gerçeği transferi ve yan verilerin paylaşımı gibi durumlar için kullanılabilir.
Isaac Lab 2.2’de Neler Yeni?
En son Isaac Lab güncellemesi, GR00T N1 modelleri için benchmark betikleri, geliştirilmiş sentetik hareket verisi üretimi, Omniverse Fabric ile daha hızlı yükleme süreleri ve geliştirilmiş emme çubuğu gripper modelleri içeriyor.
NVIDIA Isaac GR00T N Modellerini Değerlendirme ve Benchmarking
Isaac Lab’ın son sürümü, NVIDIA Isaac GR00T N ailesinin temel modellerinin kapalı döngü değerlendirilmesi için çevre benchmark betiklerini destekliyor. Geliştiriciler, kapalı döngü benchmarkları çalıştırmak için bu önceden yapılandırılmış çevreleri ve endüstriyel görevleri yükleyebilir.
GR00T-Mimic ile Geliştirilmiş Sentetik Hareket Üretimi
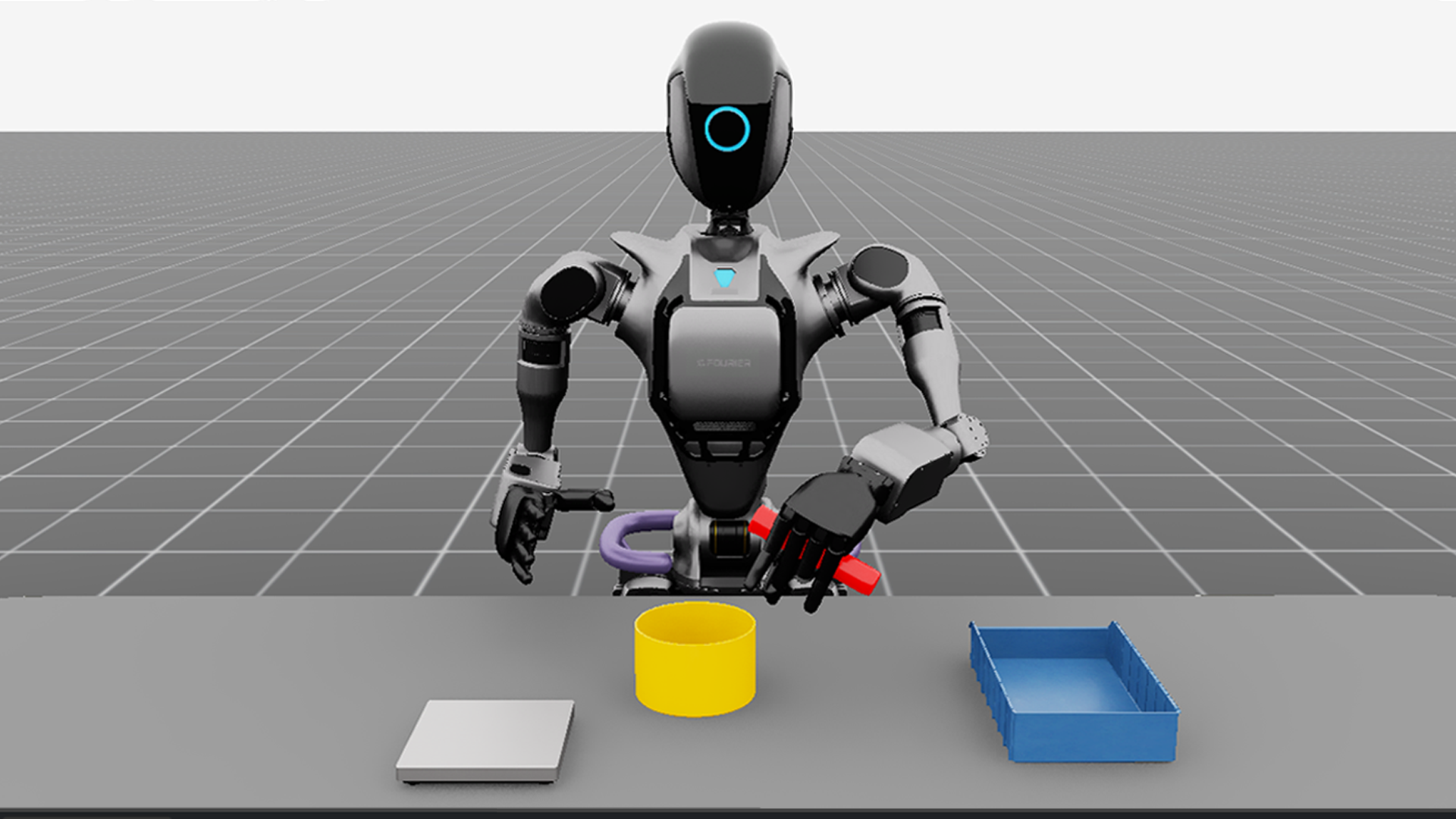
Isaac Lab 2.2, önceden oluşturulmuş çevrelerle birlikte, çift kollu manipülasyon yetenekleri sunuyor. Bu, veri toplamak için tasarlanmış özel örnek ortamlarla birlikte geliyor.
Bu yeni eğitim ortamları, Fourier GR1 insansı robotunun gözünden görsel girdiler ile birlikte GR00T N modeline yönelik eklem durumu bilgilerini içeriyor. Geliştirilmiş sentetik veriler sağlayarak eğitim süreçlerini hızlandırıyor.
Yaşam Kalitesini Artırma
Isaac Lab’ın yeni sürümü, NVIDIA Fabrici kullanacak. Bu kütüphane, sahne verilerinin yüksek performansla oluşturulmasını, değiştirilmesini ve erişilmesini sağlar.
Tensorize Edilmiş Emme Cup’ları
Yüzey tutucular, robot manipülasyonunda önemli bir bileşendir. Fiziksel olarak doğru bir simülasyon ve tensorize edilmiş erişim, emme çubuğu bazlı pekiştirme öğrenim görevleri ve kontrol davranışı sağlamak için şarttır.
Artık, Isaac Sim ve Isaac Lab, kullanıcıların deformasyon yapabilen tutucular oluşturmalarına ve grip kuvvetlerini ölçerek emme çubuğu parametrelerini tensorize edilmiş bir şekilde güncellemelerine imkan tanıyacak!
NVIDIA Isaac Sim 5.0 ve Isaac Lab 2.2, bu yaz mevsiminde kullanıma sunulacak.
Ecosystem Adoption
Agility Robotics, Boston Dynamics, Fourier, Mentee Robotics, Neura Robotics ve XPENG Robotics, NVIDIA Isaac Sim ve Isaac Lab kullanarak insansı robotlarını simüle etmekte ve doğrulamaktadır. Skild AI, genel robot zekası geliştirmek için bu simülasyon altyapılarını kullanıyor. General Robotics ise bu simülasyonları robot simülasyon platformuna entegre ediyor.
Ayrıca, Taiwan’ın önde gelen elektronik ve robotik üreticileri, Adata, Advantech, Delta Electronics, Foxconn, Foxlink, Solomon, Techman ve Wistron gibi şirketler, NVIDIA Isaac Sim ve Lab’i kullanarak yapay zeka destekli robotların geliştirilmesine katkıda bulunuyorlar.
Robotik Çözümler Geliştirmeye Başlayın
Geliştirme hedeflerinizi desteklemek için ek kaynaklar ve referans mimariler için NVIDIA Geliştirici Programı’na kaydolun.
- NVIDIA Isaac Sim, NVIDIA Omniverse üzerine inşa edilmiş bir referans uygulamasıdır; geliştiricilerin AI tabanlı robotları ve otonom makineleri fiziki bir ortamda tasarlayıp simüle etmelerini sağlar.
- NVIDIA Isaac Lab, robot öğrenimi için hafif bir uygulamadır.
- NVIDIA Isaac Perceptor, otonom mobil robotlar (AMR) için bir referans iş akışıdır.
- NVIDIA Isaac Manipulator, yeni temel modeller ve endüstriyel robot kolları için bir referans iş akışını sunar.
- NVIDIA Isaac ROS, açık kaynak ROS 2 yazılım framework’ü üzerine kurulmuş bir paket ve AI modelleri koleksiyonu sunar, ROS geliştiricilerine NVIDIA hızlandırması sağlar.
- NVIDIA Jetson, otonom makineler ve gömülü uygulamalar için önde gelen bir platformdur.
COMPUTEX açılış konuşmasını izleyin. NVIDIA kurucusu ve CEO’su Jensen Huang ile birlikte NVIDIAGTC Taipei 2025oturumlarını da izleyebilirsiniz.
Gelecek olanOpenUSD Insiders canlı yayınına 28 Mayıs Çarşamba günü, PDT 11’de katılın ve NVIDIA Isaac Sim ve Isaac Lab sürümü ile GTC Taipei’deki diğer fiziksel AI duyurularını tekrar gözden geçirin.
Gelişmelerden haberdar kalmak içinbültenimize abone olun ve NVIDIA Robotics’iLinkedIn, Instagram, X ve Facebook üzerinden takip edin. Ayrıca, NVIDIA belgeleri ve YouTube kanallarını keşfedin ve NVIDIA Geliştirici Robotik forumuna katılın. Robotik yolculuğunuza başlamak için ücretsiz NVIDIA Robotik Temel Kursları’na kaydolun.
NVIDIA Isaac kütüphaneleri ve AI modelleri ile fiziksel yapay zeka sistemleri geliştirmeye başlayın.




